
搜索结果: 1-15 共查到“知识库 系统”相关记录6510条 . 查询时间(1.348 秒)
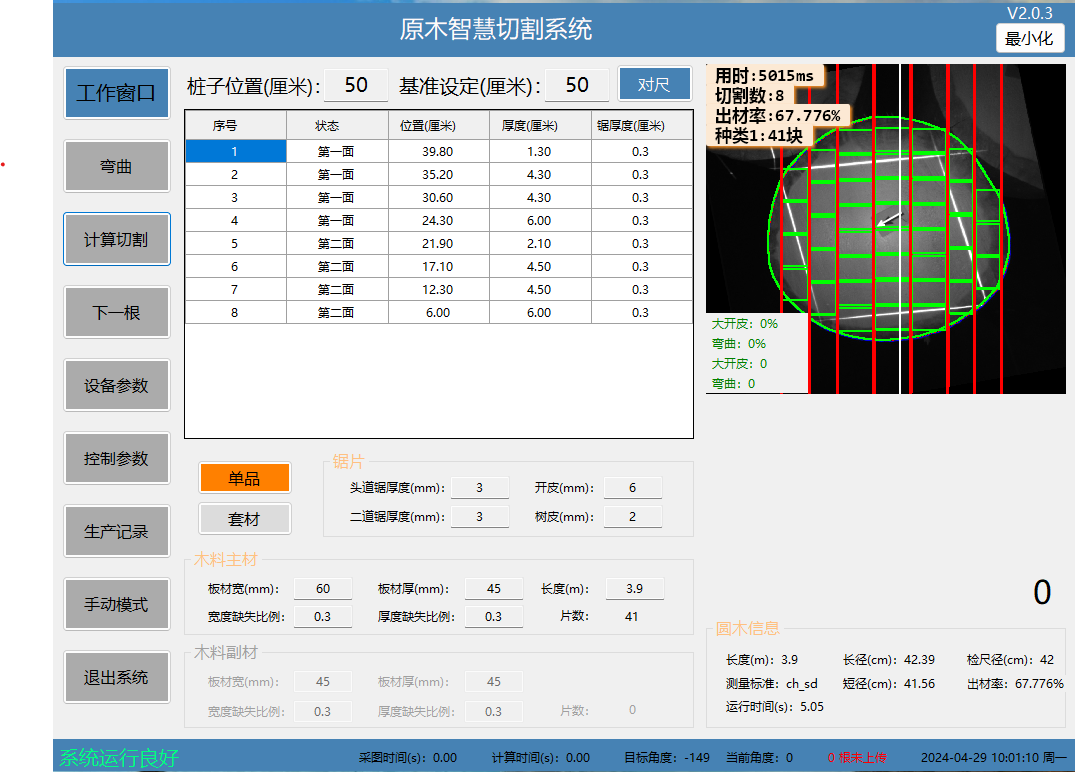
原木智慧切割系统(图)
原木 智慧切割 软件系统
2024/10/29
核心技术:针对原木加工领域,掌握原木检尺径在线测量和智能规划算法,实现了原木的自动化切割,专利正在申请中。成果体现形式:软件系统/平台。技术成熟度:产品得到验证。成果领先性:核心指标达到国际技术同等水平。
浙江大学计算机辅助设计与图形系统全国重点实验室开放课题2024年度申请指南。
时滞取值概率未知下的线性时滞系统辨识方法
系统辨识 参数估计 时变时滞 时滞取值概率未知
2024/1/16
在大多数系统辨识方法中,通常假设时变时滞在其可能的取值范围内服从均匀分布.但是这种假设是非常受限的且在实际过程中常常无法得到满足.因此在时滞取值概率条件未知的情况下,针对一类线性时变时滞系统提出有效的辨识方法.利用期望最大化(Expectation maximization,EM)算法将拟研究的辨识问题公式化,期望最大化算法通过不断地迭代执行期望步骤和最大化步骤得到优化的参数估计.在期望步骤中,将...
江苏无锡:以系统化思维打造世界级物联网集群
系统化思维 世界级 物联网集群
2024/4/24
自2009年国务院批准建设无锡国家传感网创新示范区以来,无锡市上下戮力同心、实干实为,2021年以首批第二名的优异成绩入选国家先进制造业集群。这标志着无锡落实先进制造业集群建设战略部署取得阶段性成效,进一步夯实“世界物联网发展看无锡”的良好基础,开启更高水平建设国家传感网创新示范区、打造世界级物联网产业集群的历史新阶段。
新疆棉花生产基础数据库平台建设及其专家系统
新疆棉花生产 基础数据库 平台建设 专家系统
2023/8/22
自治区科技进步奖二等奖.项目关键成果及其取得方式(1)新疆棉花信息分类标准新疆维吾尔自治区地方标准《棉花作物信息数据元应用规范》(DB65/T3059-2010)。提取棉花作物生育规律的基础数据元概念及数据元,并根据在棉花作物生产过程中的实际应用情况,对棉花作物的生育规律基础数据元进行分类及编码,制订完成了新疆棉花信息分类标准。(2)新疆棉花生产基础数据库平台《棉花生产农情基础数据采集管理系统》(...
切换拓扑下动态事件触发多智能体系统固定时间一致性
多智能体系统 固定时间一致性 动态事件触发控制 切换拓扑
2024/1/16
针对有扰动的一阶非线性多智能体系统在切换拓扑下的实际固定时间平均一致性问题,提出了基于动态事件触发机制的固定时间一致性协议.该一致性协议在节约更多资源的情况下,使多智能体系统以更快的速度达到一致.相对于有限时间一致性控制算法,固定时间一致性控制算法的收敛时间不依赖于初始状态,并且可以通过选择合适的控制器参数设定相应的收敛时间上界.通过设计一个包含双曲正切函数的测量误差,证明系统不存在Zeno行为....
基于平行Petri网的制造系统调度与控制一体化方法
调度 控制 平行Petri网 赋时Petri网
2024/1/17
为了消除制造系统调度层与控制层之间的隔阂,实现对生产事件快速灵活响应,本文提出了一种调度与控制一体化的方法.首先,定义了一种新型Petri网模型,即平行Petri网,从而集成地描述了传感器、执行器、任务和资源信息,构建制造系统的信息物理系统模型;其次,提出了一种从平行Petri网到赋时Petri网的抽象简化方法,大规模压缩优化调度所需搜索的状态空间;再次,定义了策略Petri网以描述最优调度策略....
面向性能增强的双惯量伺服系统状态反馈控制
双惯量伺服系统 状态反馈 预设性能函数 函数逼近器
2024/1/17
为避免使用函数逼近器(神经网络或模糊系统),并提高双惯量伺服系统的瞬态响应和稳态性能,针对含外部扰动的双惯量伺服系统,提出一种基于预设性能函数(Prescribed performance function,PPF)的类比例状态反馈控制策略.首先,提出一种改进的带有最大超调、收敛速率以及稳态误差的预设性能函数,并将该函数融入控制器设计使二惯量伺服的跟踪误差保持在预定的边界之内.其次,基于预设性能函...
族库系统的建立及族文件管理器的开发研究(图)
BIM技术 族文件标准 族文件管理
2023/8/14
电力土建在应用BIM技术时,普遍存在设备及构件类型多、参数化复杂等问题。通过对电力土建BIM设计技术研究,制定Revit族文件的制作标准,为族文件的标准化和参数化提供参考;研究Revit族文件的管理方法,提出族文件的制作流程及管理标准,为族文件管理器的研发提供依据,为电力土建BIM技术标准化提供技术支撑,可提高电力土建BIM设计成果的质量,减少设计的时间和成本。
本文在分析智能制造对PID整定的新需求及PID整定面临的挑战难题的基础上,将自动化的建模、控制与优化和人工智能的深度学习与强化学习深度融合与协同,提出了自适应与自主的PID整定的智能优化方法,包括端边云协同的PID控制过程数字孪生模型和强化学习与数字孪生模型相结合的PID整定算法.将工业互联网的端边云协同技术与PLC控制系统相结合,研制了PID整定智能系统,并在重大耗能设备―电熔镁炉成功应用.该系...
针对通信网络遭受欺骗攻击的离散时间多智能体系统,研究其均值趋同和隐私保护问题.首先,考虑链路信道存在窃听者的情形,提出一种基于状态分解思想的分布式网络节点值重构方法,以阻止系统初始信息的泄露.其次,针对所构建的欺骗攻击模型,利用重构后节点状态信息并结合现有的安全接受广播算法,提出一种适用于无向通信网络的多智能体系统均值趋同控制方法.理论分析表明,该方法能够有效保护节点初始状态信息的隐私,并能消除链...
尽管信息物理系统的稳定性已经得到了广泛的研究,但大部分的学者皆关注于通信网络延时或攻击下的信息物理系统的稳定性问题,无网络通信的信息物理系统的信物融合稳定性分析策略亟待提出.其中,内嵌数字控制系统的并网逆变器系统是一种最简单、最典型的信息能源系统.同时,从效率的角度出发,逆变器的开关/采样频率总是选择尽可能低的频率,其势必产生系统固有延迟时间(控制理论中称为时间延迟)。
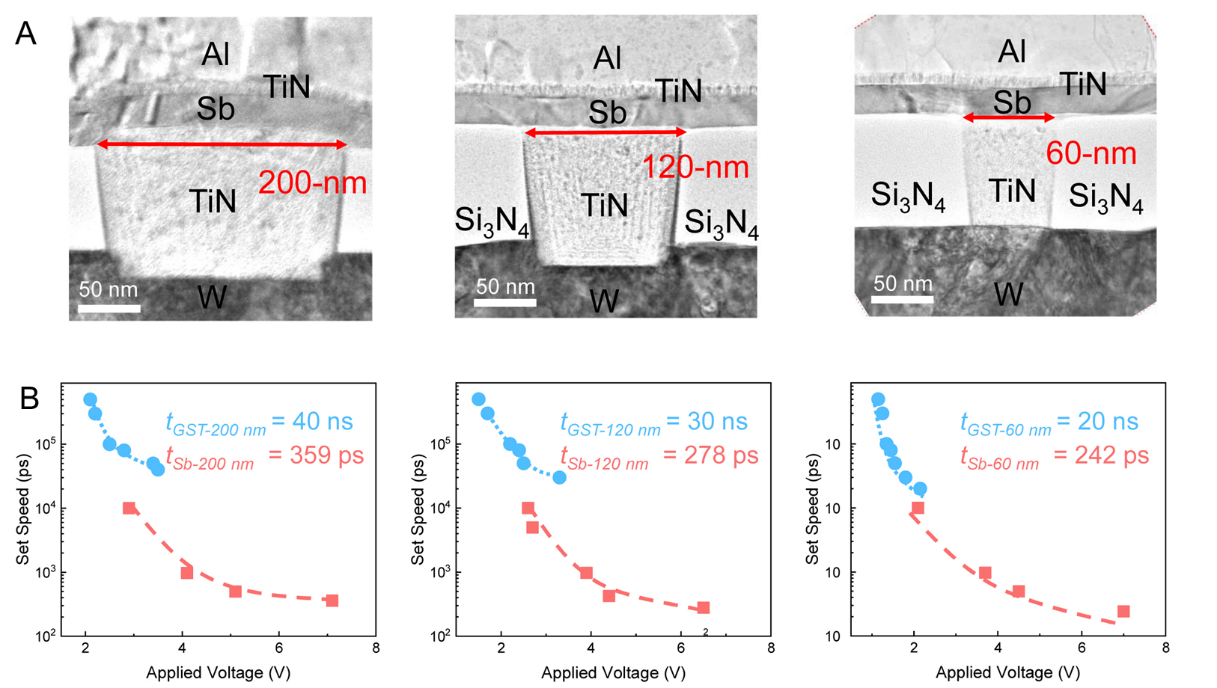
当今,电脑系统采用层次化存储架构:缓存、内存和闪存。离CPU越近,对存储器存储速度需求越高,如内存的速度为纳秒级别,而缓存则需要皮秒级别。作为下一代存储器的有力竞争者,相变存储器的速度决定了其应用领域,而相变存储器速度主要由相变材料的结晶速度(写速度)所决定。研究表明,相变存储器的热稳定性越差,结晶速度越快,而单质锑(Sb)是目前已知热稳定性最差的相变材料,可能具有最快的操作速度。